Depuis une vingtaine d’années, des systèmes très sophistiqués investissent de plus en plus les blocs opératoires. Utilisant les technologies de la robotique sans être de véritables robots au sens traditionnel du terme, ces équipements offrent une aide précieuse au chirurgien en jouant le rôle de « troisième main » ou de « véritable GPS ». Explications par l’un des meilleurs experts de ces innovations, le Professeur Philippe Merloz, Chirurgien à la Clinique Universitaire d’Orthopédie au CHU Albert Michallon à Grenoble, et ancien président de l’Académie d’Orthopédie-Traumatologie.
Il existe aujourd’hui des « robots » dans les blocs opératoires. Quelle est leur fonction ?
Philippe Merloz : Il ne faut pas se méprendre sur le terme de « robots ». Ils ne ressemblent pas aux robots des chaînes de montage des usines automobiles qui sont programmés pour effectuer une tâche précise sans intervention humaine, comme par exemple des points de soudure. Les « robots de salles opératoires » ne réalisent pas seuls des gestes de façon automatisée mais font office de « 3ème main » ou de « 3ème œil » du chirurgien. Ils sont toujours actionnés par le chirurgien et placés sous sa dépendance totale. Le robot qui opère tout seul n’existe donc pas encore, même s’il y a eu des essais dans ce sens. Dans les années 90, IBM avait créé « Robodoc », un robot adapté de ceux des usines pour fraiser les fémurs lors de la mise en place des prothèses de hanche. Mais ces équipements on fait long feu car ils n’offraient aucun bénéfice pour le patient et présentaient plus d’inconvénients que d’avantages.
Qu’entendez-vous par « troisième main » ?
PM : La troisième main peut servir, par exemple, d’écarteur ou de porte instrument. C’est le cas du robot DA VINCI™. C’est un système composé de bras multiples placé au dessus de la table d’opération. Chaque bras est doté d’un instrument (une caméra ou une lumière ou un écarteur, ou une pince d’électrocoagulation…). Le chirurgien est placé à deux ou trois mètres de la table devant un écran avec deux « joysticks » qui lui permettent de manipuler les différents instruments.
Pour quelles interventions les chirurgiens ont recours à ce type d’équipements ?
PM : Ces outils (robot DA VINCI™) ne sont pas utilisés en chirurgie orthopédique mais uniquement en chirurgie digestive ou en urologie pour les opérations effectuées à partir du thorax et de l’abdomen. Leur principal avantage est d’éviter les grandes incisions. Tout se fait en per cutané. Les outils sont passés à travers les parois à l’aide de trocarts (tiges cylindriques creuses) placés au niveau du thorax ou de la cavité abdominale. C’est donc une chirurgie mini-invasive. Leur autre avantage est lié aux capacités de dextérité et de mobilité offertes par les outils (possibilité de travailler sur 360° contrairement aux mains du chirurgien qui ne peuvent tourner autour d’un axe que de 180°).

Robot Da Vinci™ : à gauche, la console de commande ; à droite, « robot » porteur d’outils.
Et à quoi servent les robots qui font office de « troisième œil du chirurgien » ?
PM : Plus que de robots, je préfère parler de systèmes de navigation ou de systèmes de positionnement d’outils assistés par ordinateur. Ces outils sont utilisés principalement en orthopédie pour la chirurgie du genou et, plus rarement, pour celle du rachis, de la hanche, de l’épaule, la chirurgie des tumeurs osseuses mais aussi en ORL, en chirurgie maxillo-faciale, en neurochirurgie, en chirurgie digestive et en urologie. En cours d’intervention, ils permettent de présenter au chirurgien des images de l’organe opéré en réalité augmentée. Ce sont en quelque sorte les GPS du chirurgien. Pour comprendre leur intérêt, le meilleur exemple est celui d’une greffe de ligament croisé antérieur du genou. Ce dernier a la particularité d’être isométrique : sa longueur ne change pas de l’extension complète du genou à la flexion. Cette isométrie est fonction de ses points d’attache sur les os. Dans la majorité des cas, l’isométrie du nouveau ligament (greffe) posé à l’aide d’outils traditionnels est correcte et tout se passe bien. Mais dans 15% à 20% des cas, elle est imparfaite bien que le chirurgien dispose de moyens conventionnels précis (viseurs) pour la contrôler. Résultat : la longueur du ligament se modifie entre l’extension et la flexion du genou, provoquant tôt ou tard une rupture de la greffe. Grâce au « troisième œil » (le GPS), le chirurgien va être guidé pour trouver les points d’attaches se rapprochant le plus de l’isométrie physiologique.
Comment cela fonctionne-t-il ?
PM : Les deux principes de base reposent sur l’utilisation des modèles statistiques déformables et sur celui du GPS. Les outils du chirurgien sont repérés dans l’espace grâce à une caméra infra-rouge (GPS) et l’adaptation « au plus près » à l’anatomie du patient (grâce au modèle statistique déformable du genou) permet la « personnalisation » du comportement isométrique du ligament. Dès lors l’ordinateur peut fournir des images virtuelles indiquant les deux points d’attache de la greffe de ligament les plus favorables à la bonne isométrie. Cette méthode permet de mettre en place des implants en suivant leur positionnement en temps réel. Comme les robots de type « troisième main », cette forme de guidage encore appelée « navigation » ouvre la voie à la chirurgie mini-invasive et à la chirurgie per cutanée.

Système de navigation de type « GPS » : les référentiels au premier plan sont fixés sur le patient par des pins ; au deuxième plan, le navigateur surmonté du localisateur infra-rouge.
Existe-t-il d’autres méthodes de navigation par ordinateur ?
PM : Oui, notamment à partir d’images scanner préopératoires du patient mais c’est aujourd’hui une technologie qui commence à être dépassée. A l’inverse de nouveaux matériels commencent à arriver. Ce sont les scanners dits de bloc opératoire. Ils sont capables de fournir en quelques instants, et en cours d’opération des images en trois dimensions de l’organe opéré. Cela, au sein même du bloc opératoire. Ces équipements encore très coûteux – seuls cinq ou six grands centres en possèdent en France - permettent une très grande précision lors de l’intervention. Ils se généraliseront dans les dix ans à venir.
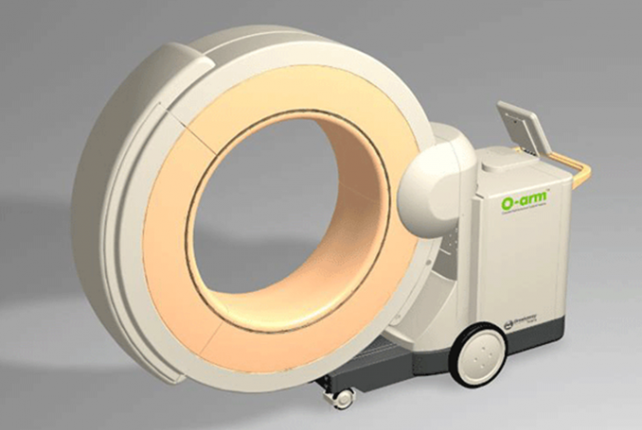
Scanner de bloc : cet appareil mobile fournit des images en trois dimensions de l’organe opéré. Le patient est installé au centre du O.
Les patients doivent-ils donner leur accord pour être opérés à l’aide d’un robot ? Et peuvent-ils refuser ?
PM : A partir du moment où ces systèmes ont été validés sur le plan technique et clinique et qu’ils ont la norme CE, il n’y a pas besoin de demander l’accord du patient, car ils sont considérés comme des outils chirurgicaux au même titre que l’est un bistouri électrique. En revanche, le patient peut toujours refuser d’être opéré avec un système de ce type.
L’utilisation des « robots » présente-t-elle des risques, notamment en termes d’infection ?
PM : Les précautions qui sont prises en terme de prévention des infections avec ces systèmes sont les mêmes que toutes celles concernant les dispositifs médicaux de blocs opératoires (appareils de radiologie, d’échographie, microscope, ou d’anesthésie). Il n’existe pas de risque inhérent à l’utilisation de ces systèmes, mais il faut qu’ils soient utilisés par un chirurgien formé à ces techniques et qui ait une bonne expérience de la chirurgie conventionnelle.
Ces équipements sont coûteux. Sont-ils encore une exception dans les hôpitaux et les cliniques ?
PM : Mis à part les scanners de bloc dont nous avons déjà parlé, ils sont à peine plus coûteux que les appareils de radiologie de bloc opératoire. Ils sont utilisés assez couramment mais pas forcément dans tous les établissements de soins non plus, certains chirurgiens considérant qu’ils consomment trop de temps opératoire. Toutefois, cet obstacle devrait être résolu dans les années à venir. A terme, on peut imaginer leur généralisation au même titre que celle des systèmes GPS dans nos automobiles car il est maintenant démontré qu’ils sont plus précis. Ils ont également un rôle important en terme de formation en aidant les jeunes chirurgiens en apprentissage. De plus, les images du geste opératoire effectué peuvent être stockées sur un CD rom, ce qui permet de refaire l’intervention dans les jours qui suivent et donc d’acquérir une certaine expérience visuelle. Enfin, en ouvrant la voie à la chirurgie mini invasive, ils ont un retentissement direct sur la durée de l’hospitalisation, donc sur le confort du patient et le coût des soins.